以下为个人学习笔记整理,课程官网传送门,作业传送门,会议系统传送门。
# Real-time Ray Tracing(RTRT)
# what does RTX really do?
「RTX」硬件的设计主要是用于加速光线和场景求交速度。—— 每秒 100 亿根光线。
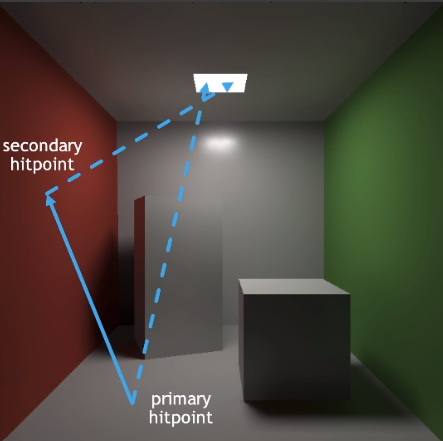
# 1 SPP path tracing:
最基本的 sample per pixel(SPP):
- primary hitpoint:从摄像机观察到的像素点(shading point)
- 1 rasterization(primary):从摄像机到「shading point」的光线。
- 1 ray(primary visibility):从「shading point」到光源的光线 —— 用于计算是否可见。
- secondary hitpoint:周围的能对「shading point」有贡献的点「间接光源」
- 1 ray(secondary bounce):由「shading point」经过一次反射到「间接光源」的光线。
- 1 ray(secondary visibility):从「间接光源」到光源的光线 —— 用于计算是否可见。
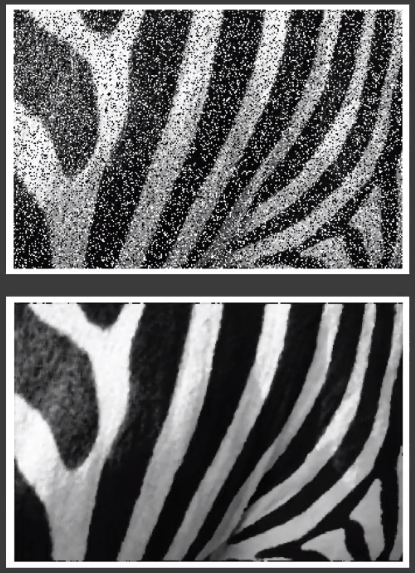
SPP 数量太少会导致画面有噪点,因此 ray tracing 的核心在于 Denoising

降噪操作前后的对比:

# Denoising Goals
- Quality:
- no overblur
- no artifacts
- keep all details
- Speed:每帧的耗时不能超过 2ms。
# Key idea
- 假设每一帧的前一帧已经做了「Denoising」。
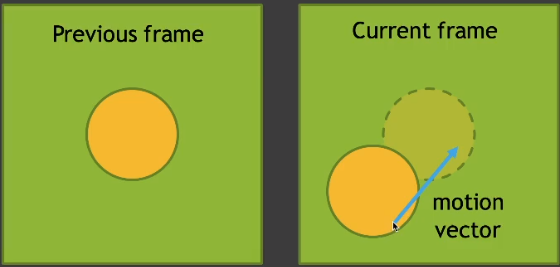
- 假设每个物体的运动都是连续的,可以使用「motion vectors」去获取以前的位置。然后就能用之前某点已经「Denoising」后的结果用于当前帧。相当于增加了 SPP。
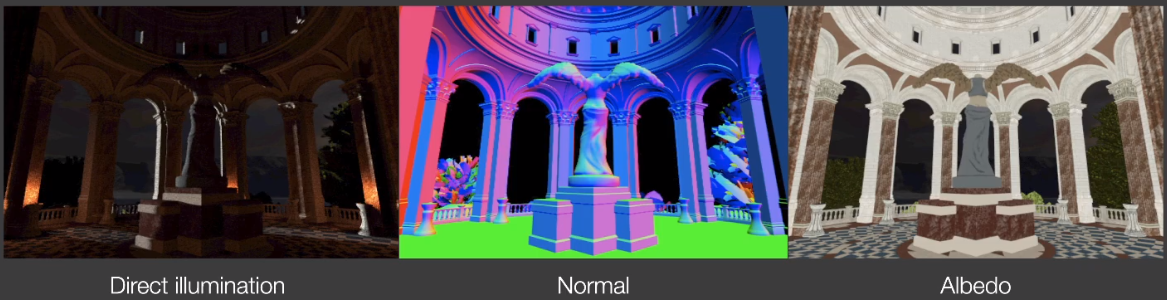
# The G-Buffers
Geometry buffer:
- screen space info:仅仅只是记录屏幕空间的信息。
- during rendering is free:渲染过程中基本无性能开销,由于处理光线追踪过程中顺带就会计算,因此缓存结果以备后续使用不会影响性能。
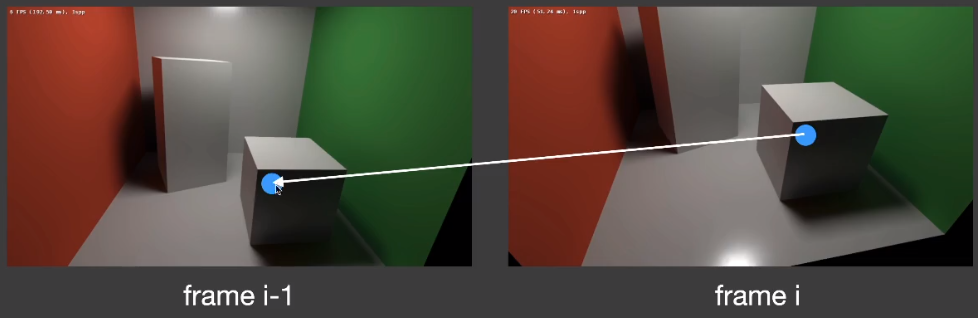
# Back Projection
给定一个像素,求出上一帧该像素的信息:
- 如果「G-buffer」有缓存世界坐标的信息,那么可以直接去拿。
- 或者计算:。输入的 是一个 3D 的向量。逆向求出像素对应位置在物体在空间中的坐标
- Motion is known:$s^\prime} \xrightarrow{T} s, s= T^{-1}s $
- 由于物体运动已知,因此可以预测物体下一帧移动到的位置。
- 得到了世界坐标移动后的位置,在进行 变换到屏幕坐标。
# Temporal Accum./Denoising
# some denote:
- 「~」:unfiltered,还没做过「filtering」。
- 「-」:filtered,已经做过「filtering」。
- 无:表示已经累计过一些结果。
# This frame(i-th frame)
先对当前帧做个 filter 降噪。
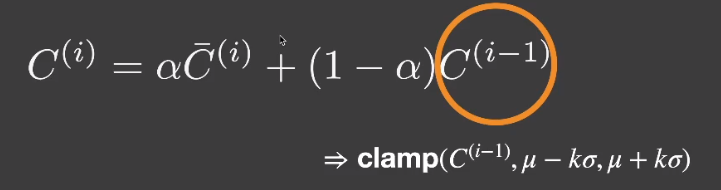
再和上一帧做一个「linear blend」, $ \alpha : 0.1 \sim 0.2$ 。
# Temporal Failure
【case1】基于时间复用的渲染,需要一定时间的预热(burn-in period)才能达到比较好的效果。
- 场景切换了 or 第一帧如何处理。
- 不同帧之间的光源变换剧烈。
- 不同镜头的频繁切换。
【case2】由于会复用上一帧结果,倒退行走(很多新的画面会加入屏幕空间),这部分内容也会缺乏预热。
【case3】由于遮挡物移动,导致不断出现的新物体(disocclusion)。

如果不解决这些问题,依旧还是用上一帧结果和当前帧进行「linear blend」,将会出现拖尾效果。
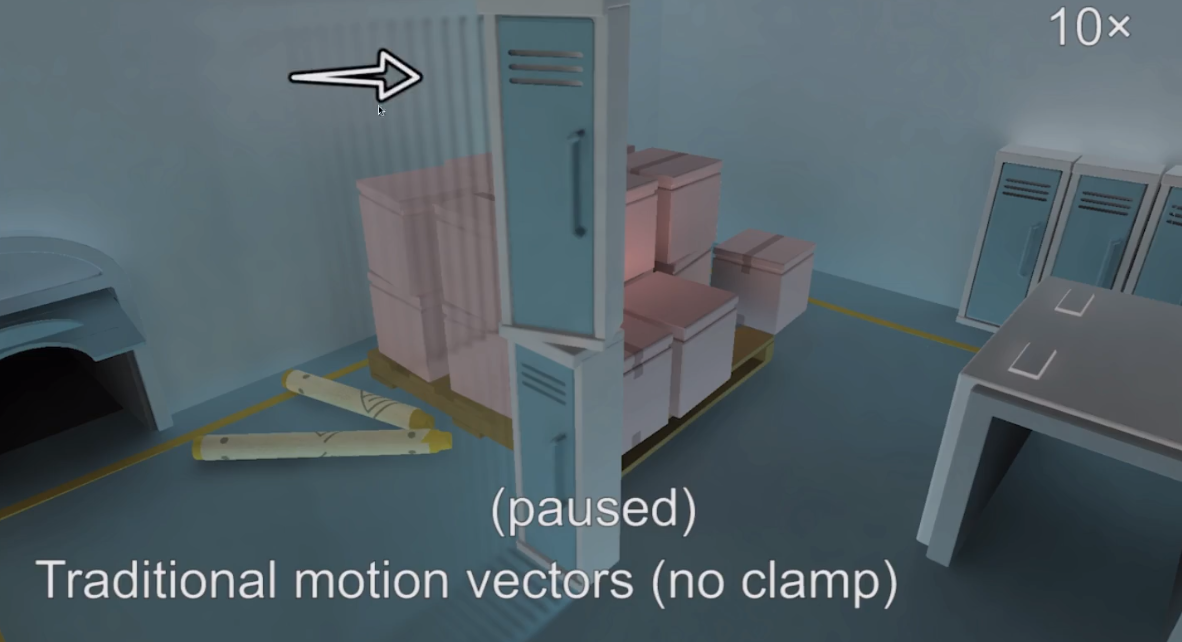
# Adjustments to Temp. Failure
# Clamping
试图拉近上一帧和当前帧值之间的差距,可以取上一帧某个像素点周围区域做个平均等。
# Detection
- 检查像素点的上下两帧物体是否一致。
- 在上一帧不太可信的情况下,适当调整 的值,从而控制以下上一帧贡献度占比。
- 换用更加强大的滤波器(filter)。
但是这样做依然会再次引入噪点。
# More Temporal Failure
加入在一个场景内,任何物体都没有移动,只移动光源的情况下,那么每一帧的「motion vector」都是 0 ,这样显然是会存在问题的,因为光源移动,必定会影响阴影的位置。
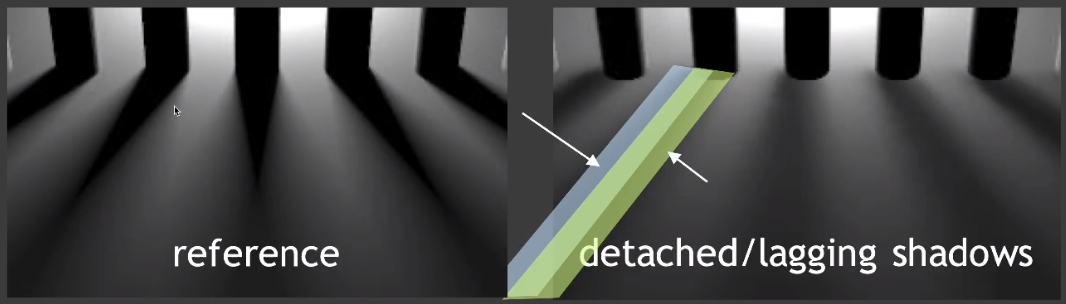
另外对于「glossy」的物体,其反射的其他周围物体如果移动,理论上,反射内容也会发生变化,但是「glossy」物体本身没有移动,因此看上去反射结果将会有一定程度上的滞后。

# Implementation of filtering
需要对图像进行(low-pass)低通滤波的处理。
- 去掉高频信息,保留低频信息。
- 只处理屏幕空间内的信息。
Inputs
- A noisy image \tilde
- A filter kernel
Output
- A filtered image \bar
通常情况下进行滤波会采用近似「Gaussion」分布的滤波核
- 范围内的任意一点都会对结果产生贡献。
- 任意点的贡献度取决于和结果的距离。
# Bilateral filtering
「Gaussion filtering」会让画面变得模糊。但往往有时,人们希望保留图像清晰的边界。

「Bilateral filtering」目的是为了能够保留图像边界的同时,对其他部分进行「filtering」。
- 判断任意点对结果的贡献时,需要先判断两点之间的颜色差是否足够小。如果过大的话说明处在边界位置,这时候就不应该对结果产生过多的贡献。

和 分别表示任意点和结果点。
得到的结果看上去边界就会比较的清晰。但是这种情况下很难区分噪声和边界,导致一些噪声残留。

# Joint Bilateral Filtering
- 「Gaussian filtering」:1 metric(distance)
- 「Bilateral Filtering」:2 metric(distance & color difference)
- 「Joint Bilateral Filtering」:use more metric
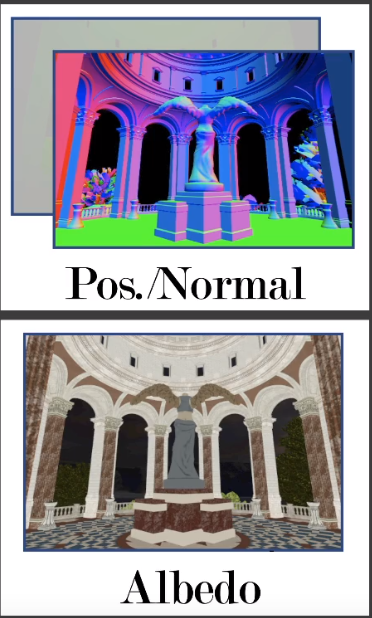
由于渲染过程中能够获取到屏幕空间内各个像素的各种信息:坐标、法线、反射率... 因此,可以考虑把它们利用起来:
- G-buffer 本身没有任何的噪声,因此可以确保得到的数值是准确的。
# Note
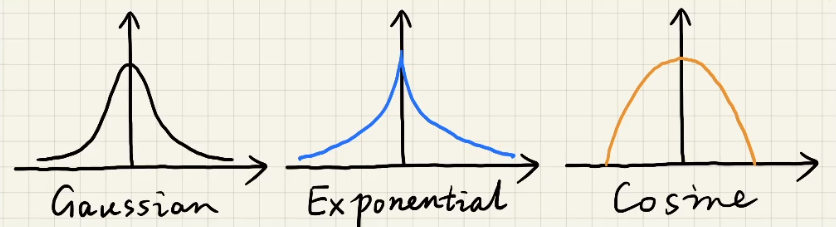
- Gaussion is not the only choice
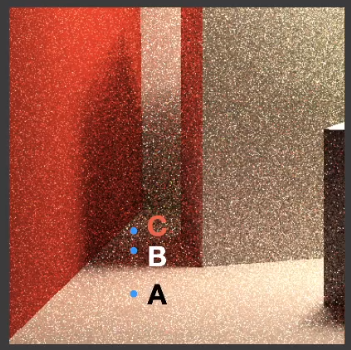
# Example
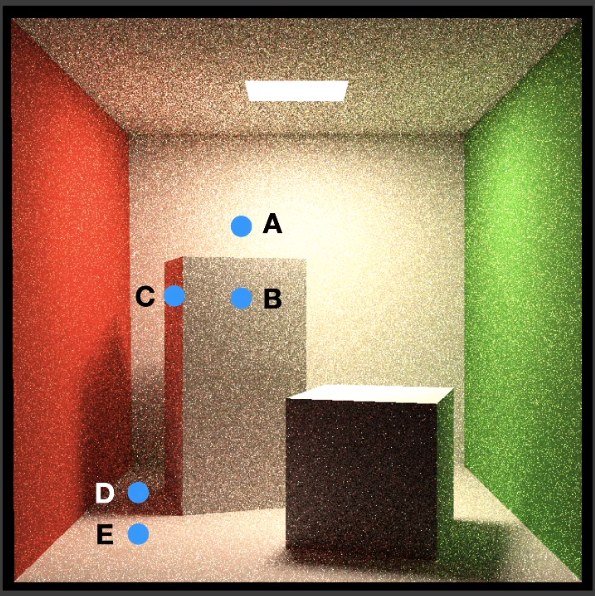
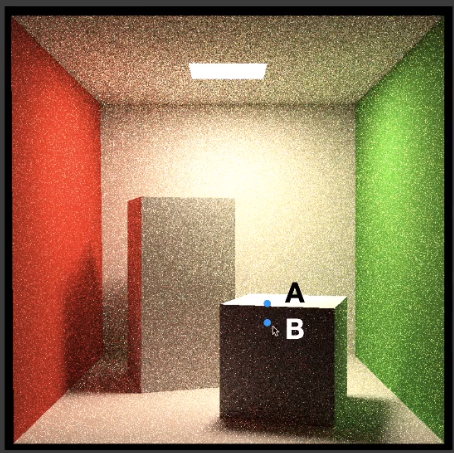
假设我们考虑以下因素
- Depth:两点的深度相差太多的情况下,可以适当减少贡献度(A & B)。
- Normal:法线方向相差太多的情况下,可以适当减少贡献度(B & C)。
- Color:颜色相差太多的情况下,可以适当减少贡献度(D & E)。
# Implementing Large Filters
大范围的「filtering」势必会造成性能开销的急剧上涨。常见的解决办法:
- Separate Passes
# Separate Passes
针对 2D 的「Gaussion filtering」都拆分为对两个 1D 的「Gaussion filtering」,因此时间复杂度可以从

# Why 2D 「Gaussion filtering」to two 1D 「Gaussion filtering」?
- 高斯函数在 2D 下的定义本质上就是 1D 的拆分。

- filtering == convolution:滤波本质上就是做卷积。

「Gaussion filtering」能够拆分取决于高斯函数本身的性质,因此如果换成「Bilateral Filtering」或者其他滤波不一定适用。
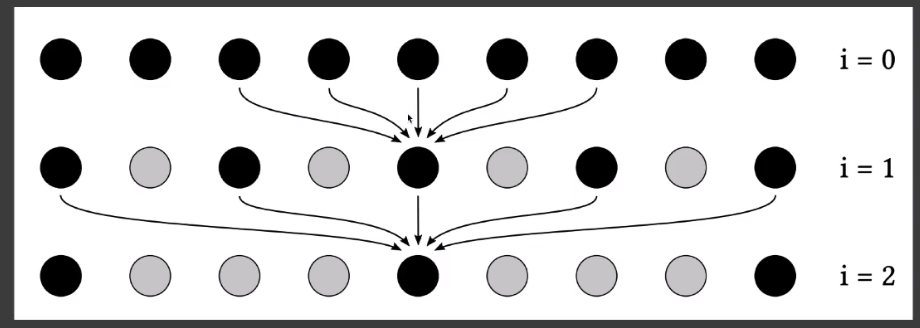
# Progressively Growing Sizes
不断扩大「filtering」大小进行滤波 ——「a-trous wavelet」
- 每次都用一个大小的滤波进行「filtering」。例如: 5X5
- 下次再用上次的结果再进行「filtering」,采用时每次的间隔不同。
- $64 \times 64 \to 5 \times 5 $ 执行 5 次。
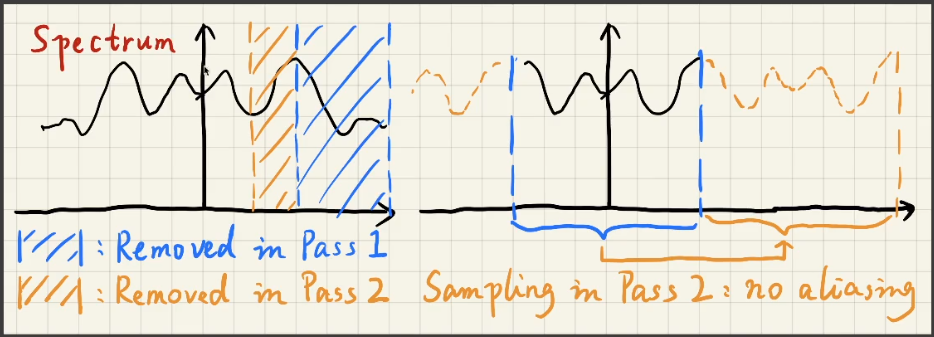
# A deeper understanding
- why growing sizes?
- larger filter == removing lower frequencies:越大的「filtering」越是能够过滤掉更低的频率
- why is it safe to skip samples?
- Sampling == repeating the spectrum:采样间隔越大,频域之间的步长就越小,走样问题就是由于步长太小导致频谱的堆叠造成,但是由于之前已经做了一次低通滤波,假设滤波之后没有高频的信息了,那么小步长所造成的堆叠部分其实相当于已经提前被过滤掉了,因此不会有混叠问题,有点类似「反走样」的操作。
# Outlier Removal
- Filtering is not almighty
- 对于一些非常亮的点(outliers),进行「filtering」只会让一个亮点变成一块更大的区域。

因此需要在执行「filtering」之前,清除掉这些「outlier」
Outlier Removal 会让最后得到的画面能量丢失
# Outlier Detection and Clamping
- 计算任意像素周围若干点的「均值」和「方差」。
- 如果某个点的值超出了「均值」±「方差」* n,那么就可以视作「outlier」。
- 需要对「outlier」进行「Clamp」操作挤压到可用范围内。
整体思路有点类似 [Temporal Clamping](#Adjustments to Temp. Failure)。
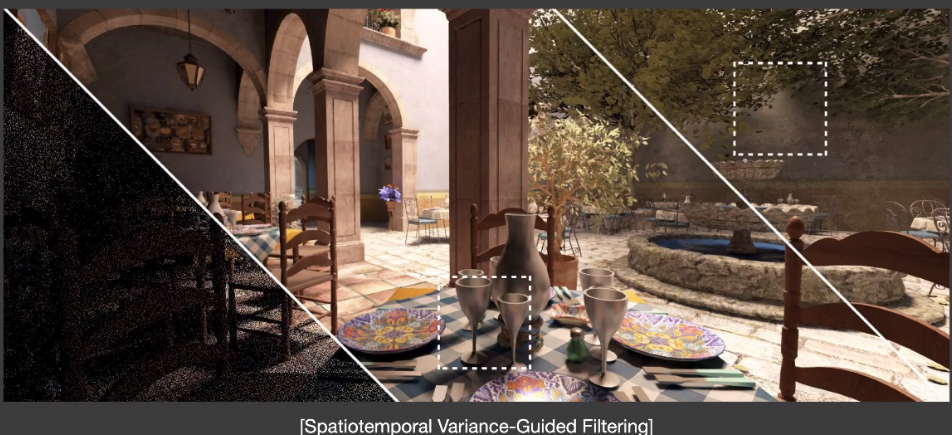
# Spatiotemporal Variance-Guided Filtering(SVGF)
# SVGF —— Basic Idea
- 和「Temporal Denoising」很类似
- 额外加入了每个像素点颜色的方差和
# SVGF —— Join Bilateral Filtering
除了「distance」和「color difference」之外,又引入了三个 metric。
- Depth
- Normal
- Luminance
# Depth
计算以点「p」沿着法线垂直方向的「法线梯度(斜率)」和「q」的距离去预测点「q」的可能深度。再和点「q」的实际深度进行比对,根据误差大小确定贡献度。
- 如果两点在一个平面上,那么预测结果将会非常接近实际结果。
- 如果不在一个平面上,那么大概率不在一个平面,这时候就可以适当减少贡献度。


# Normal
两点的法线方向不同的话,可以近似认为两点不在一个平面,那么贡献度可以适当减少。
- 一般情况下会在没有法线贴图的片段上进行计算,减少法线贴图的干扰。

# Luminance
由于噪声「C」本身非常亮,虽然「color difference」能够区分点「A」和点「B」。但是没办法区分点「B」和点「C」,这会使得过亮的噪声「C」对于点「B」的贡献度很高,这时候就需要通过两点的亮度来进行进一步筛选。
- 亮度筛选用的是点「B」颜色的方差和「B」、「C」两点颜色差的比值作为贡献度。
- 方差的计算可以取周围 7X7 的点进行计算。
- 再用「motion vectors」计算上一帧和当前帧的平均。
- 再对当前帧的「B」点周围 3X3 的方差做个「filtering」。

# SVGF —— Failure Cases
由于计算过程类似「Temporal Denoising」,因此也会存在拖尾现象。

# Recurrent AutoEncoder(RAE)
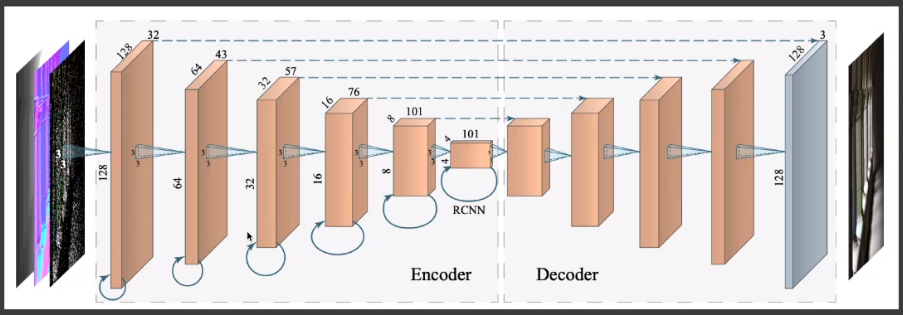
# RAE —— Basic Idea
- 基于神经网络的方法,对存在噪点的图进行「filtering」降噪。
- AutoEncoder(or U-Net)神经网络结构。
- 会使用到 G-buffers 的一些额外信息。
- 存在一定的「Temporal」(复用之前的结果)。
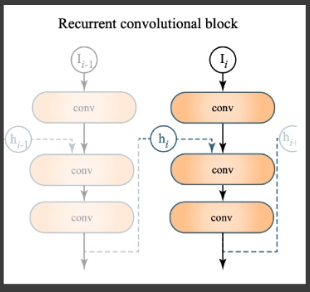
- Recurrent convolutional block:神经网络每层的输出可能会成为下层的输入,也可能成为上层的输入。
# RAE —— Results
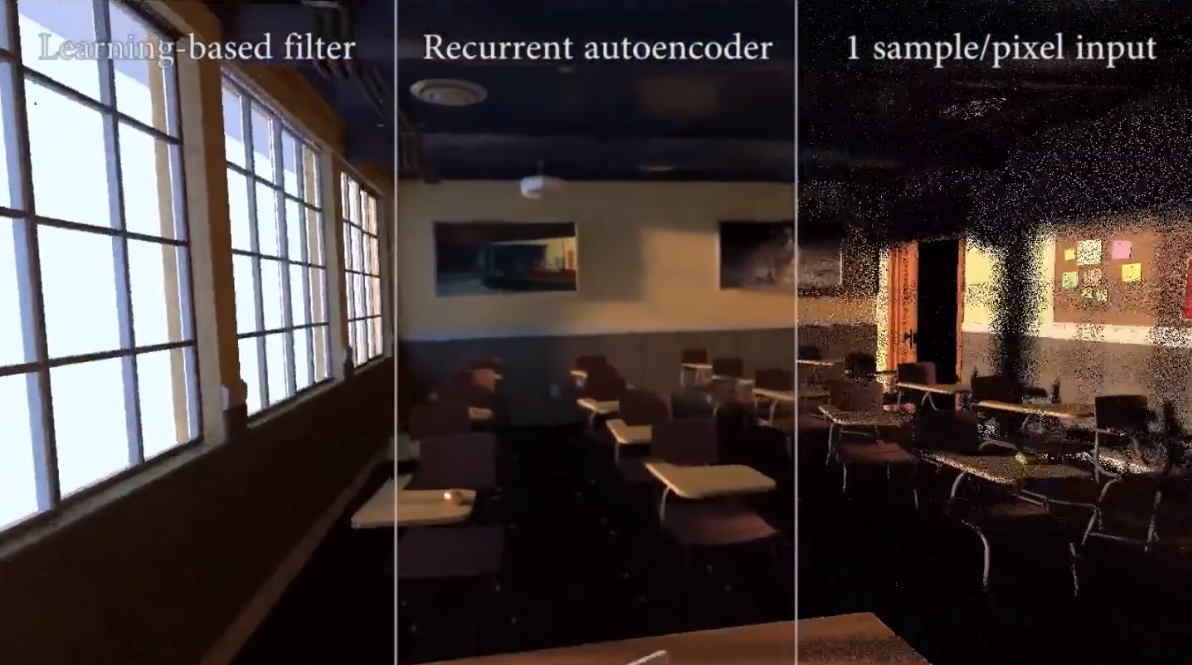
# Comparison 「SVGF」VS「RAE」
