以下为个人学习笔记整理,涉及坐标内容统一用右手坐标系,课程官网。
# 光线追踪(Ray Tracing)
光线追踪主要是用来处理以下情况:
- 实现软阴影
- 处理光线需要多次弹射的时候

# Ray Tracing VS Rasterization
# Rasterization
- 实时计算。
- 光线质量较低。
- 计算量较小。
# Ray Tracing
- 离线的计算。
- 光线质量较高。
- 计算量巨大,耗时较长。
# Light Rays
为了方便计算,对于光线,有以下三个假设:
- 认为光是延直线传播
- 光线之间的传播不会收到其他光线影响。
- 光线经过一系列的传播之后,最终会进入人眼。
# 如何实现光线追踪💡
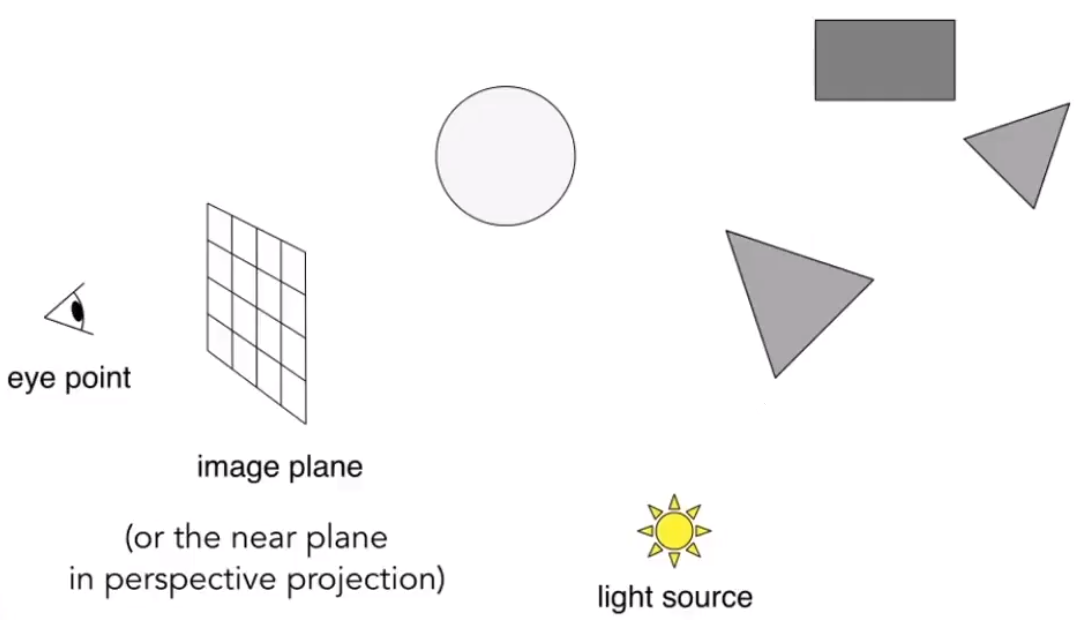
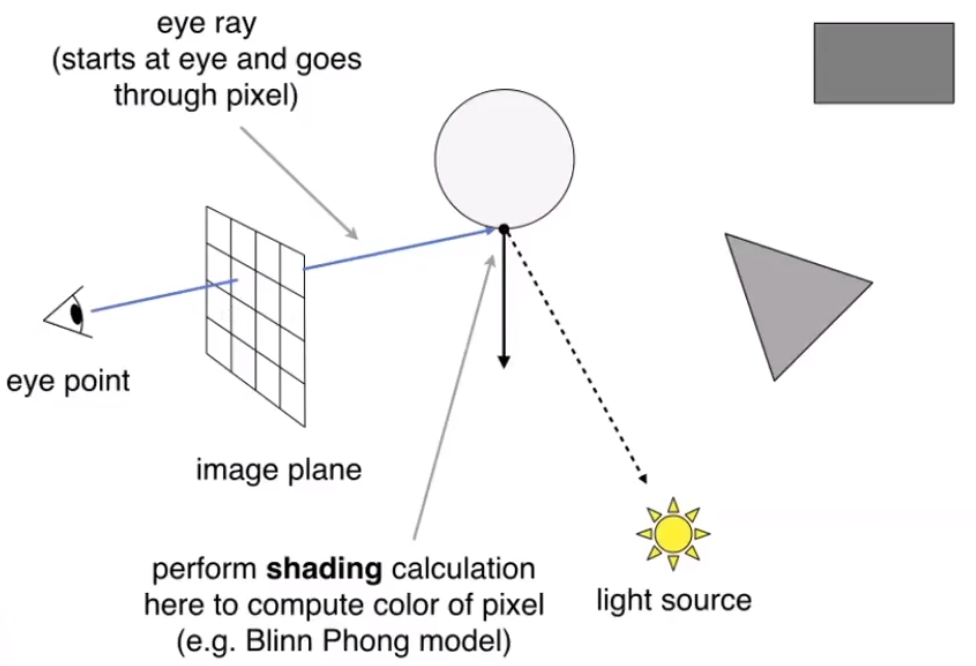
# 产生眼睛射线(Generating Eye Rays)👁🗨
产生眼睛射线有以下几个前提:
- 光线经过反射或折射后不会有损耗。
- 眼睛视作针孔摄像机(一个点)
# 得到人眼能够观察到的点👀
沿着人眼,发射光线,会和场景内的物体产生交点,这里只记录最近的交点。
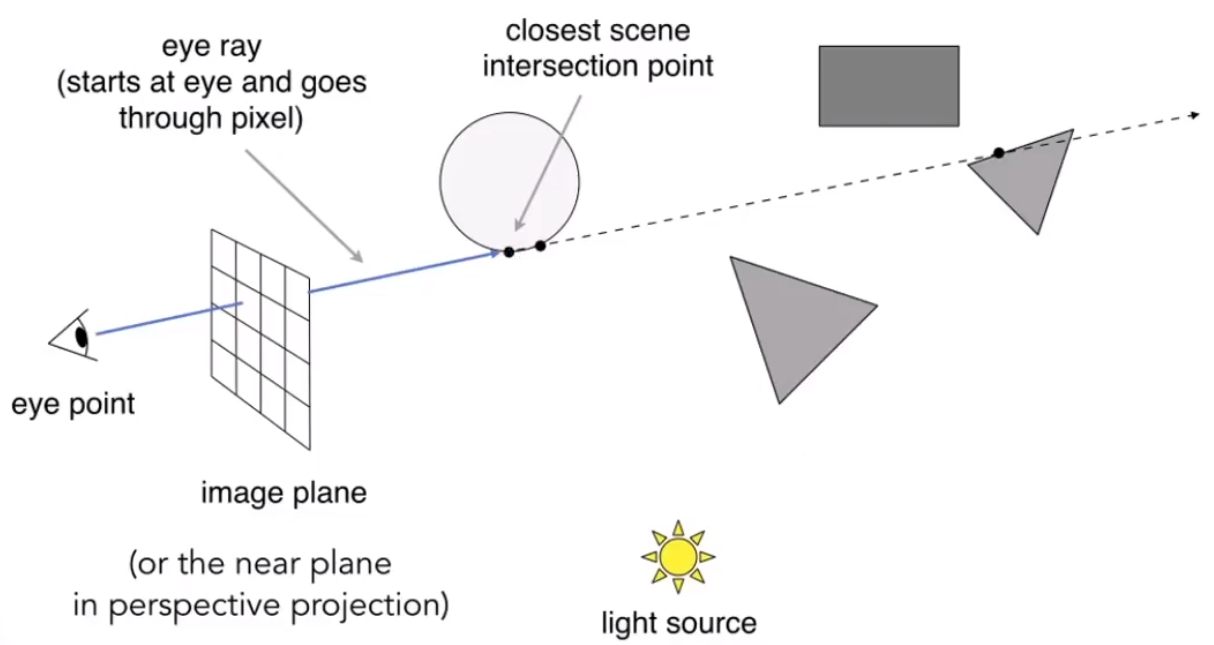
# 判断该点能否被光源照亮☀️
从交点连一条线到光源,如果中间没有物体遮挡,那么该物体就可以被人眼看见。之后就可以根据该点的法线和光源计算投影像素的着色。
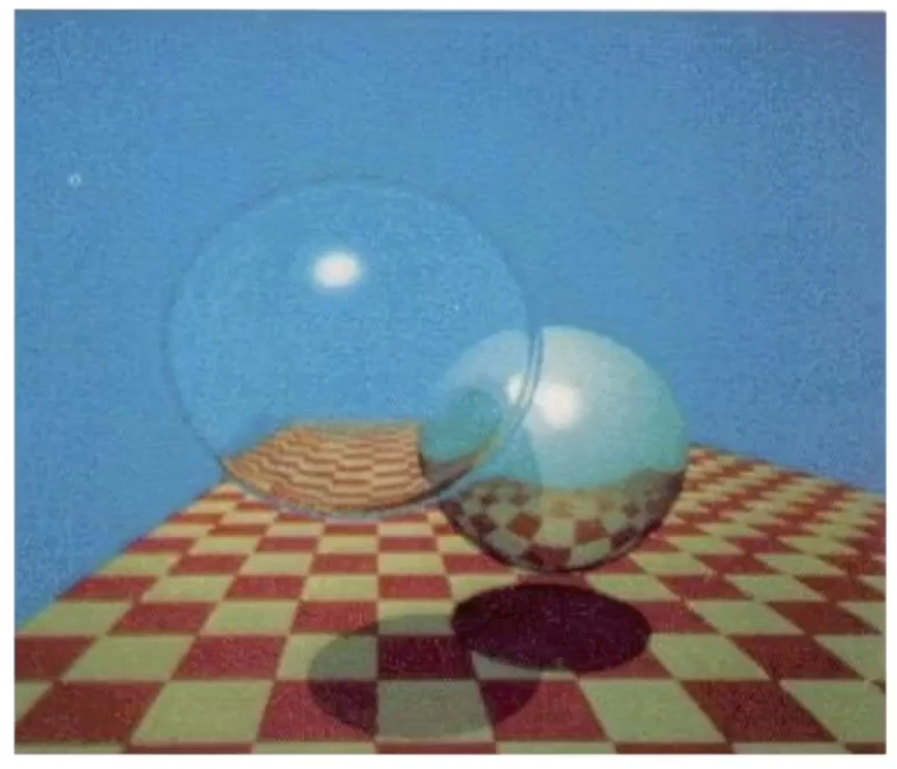
# 递归光线追踪(Recursive Ray Tracing)
考虑光线的「反射」和「折射」
- 人眼发射的光线再遇到物体时,一部分光线会发生反射,一部分光线会发生折射。
- 最终一条光线经过「反射」和「折射」再不同的物体上产生交点。
- 计算所有物体的交点和光源的关系,并根据每个点的光线权重,把最终值累加起来,就代表该点的像素。
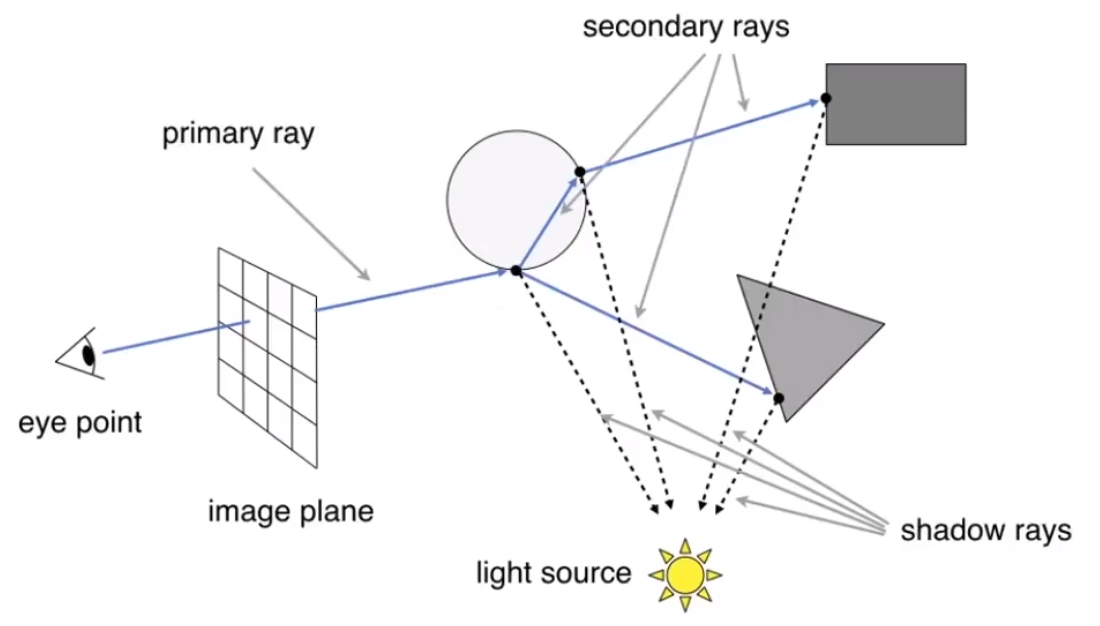
Primary Ray:从人眼射出的未经过反射和折射的光线
Secondary Rays:经过反射和折射的光线
Shadow Rays:从物体连向光源的连线
# Ray-Surface Intersection
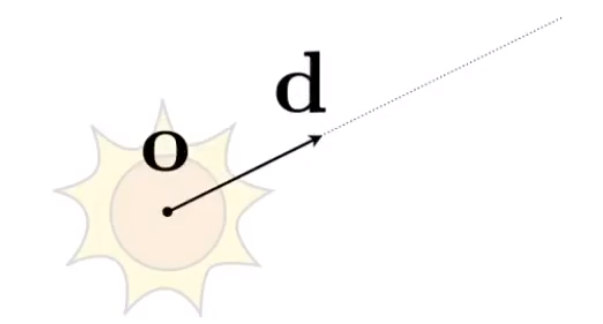
# Ray Equation
假定光线是一个起点和一个方向向量。
# 计算光线和其他物体的交点
# 光线和球的交点⚪️
就是计算,光线上的某个点也在球上。
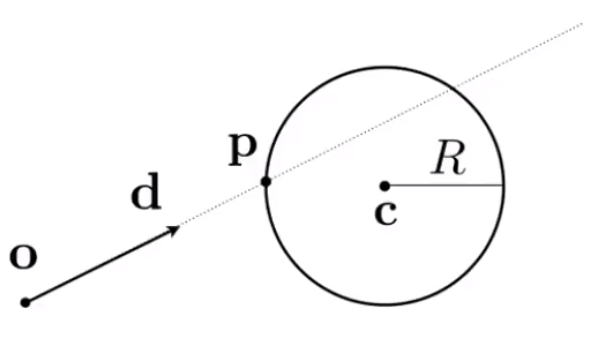
通过光线的公式和球的公式,可以得到一个计算交点的公式( 都已知):
根据最后的 t 值得出交点。
# 光线和任何物体的交点(隐式的表示)
假定任何物体都可以由 的隐式公式来表示。
光线的表示: 。
那么所有的物体都可以通过上述球圆的规则进行求解。
# 光线和任何物体的交点(显式的表示)
显示的表示实际上就是光线和多个三角形面片组成的模型求交点。换而言之,就是计算光线和多个三角形如何求交。
计算光线和三角形求交又可以简单的进行分解:
- 光线和三角形所在的平面求交。
- 交点是否在三角形内。
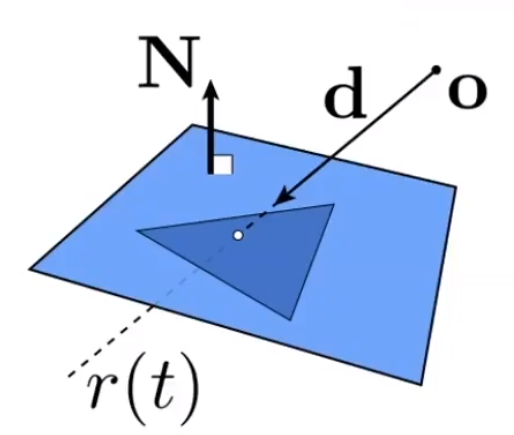
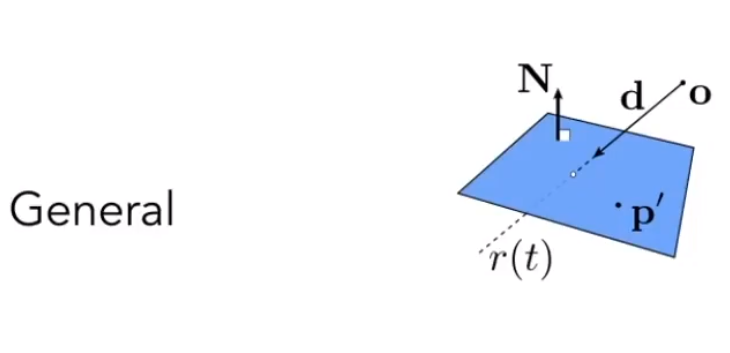
# 光线和三角形所在的平面求交
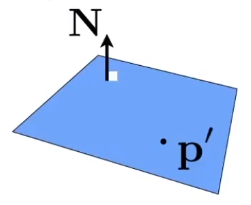
首先需要定义一个平面,定义平面可以理解为定义一个「点」和一个「法线」;点确定位置,法线确定方向。
所以平面上任意一个点都会满足如下性质:
- 该点和 组成的向量必定和法线垂直。
所以根据上述公式就可以计算两者的交点:
# 交点是否在三角形内
参考第四课的内容,点和三角形各个点形成的向量求叉积。
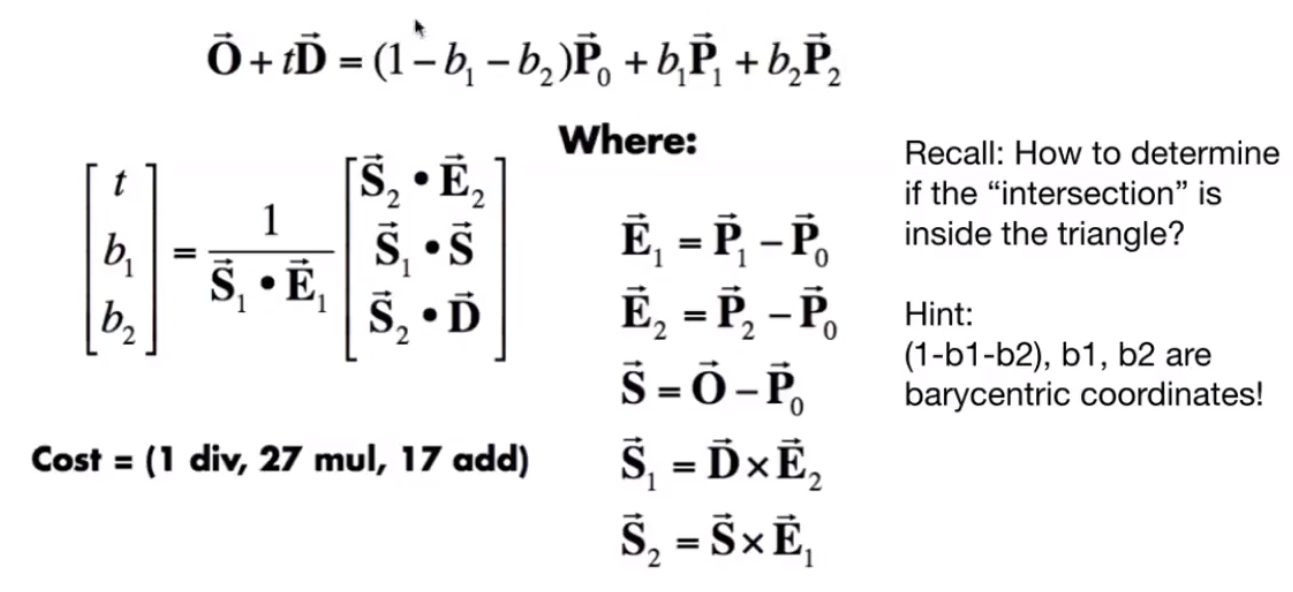
# Moller Trumbore Algorithm
该算法可以直接计算三角形和射线的交点。三角形内的点,可以通过重心坐标表示,参考第九课。
# Accelerating Ray-Surface Intersection
上述的方法虽然可以计算某个光线经过一系列反射折射,最终成像的结果,但是太慢了。如何加快速度呢?
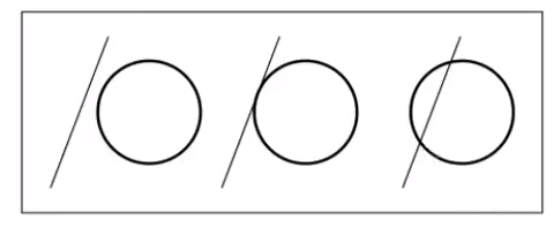
# 包围盒(Bounding Volumes)
如果光线和物体的包围盒都没有交集,那么更不可能和物体之间有交点。

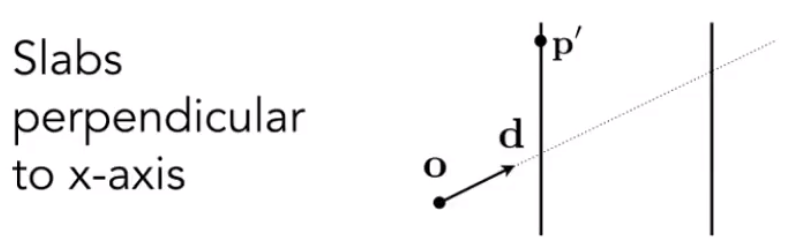
# Axis-Aligned Bounding Box(AABB)—— 轴对齐包围盒
轴对齐包围盒可以理解为「三对互相平行的平面」组成的「立方体」。
# 光线和包围盒求交
先考虑二维平面下,可以很容易计算出光线进入 和离开 每个两个平面的时间。
得到的两个 ,和两个 。最终计算出 ,
三维情况下类似。
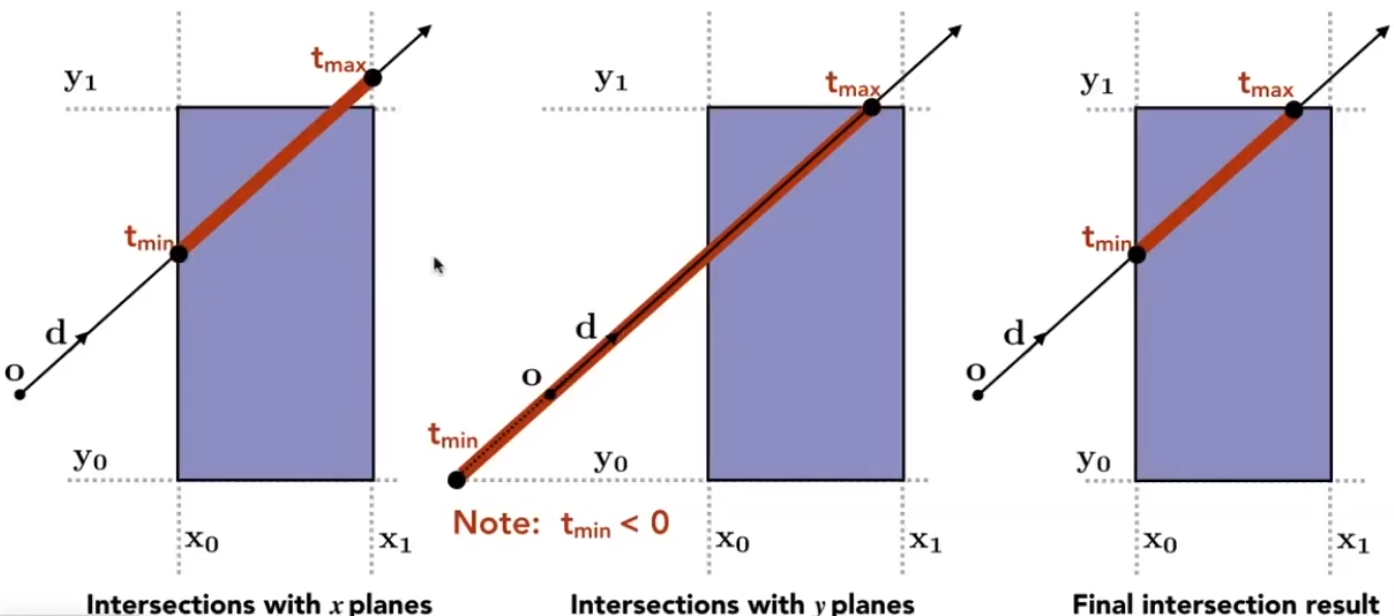
# 当 时,表示光线在包围盒后面,不相交。
# 当 时,表示光线在包围盒内,相交。
有相交的情况,结论:
# 简化后计算量对比
# 正常情况(3 减、6 乘、1 除):
# 简化后的情况(1 减、1 除):