以下为个人学习笔记整理,涉及坐标内容统一用右手坐标系,课程官网。
# 光线追踪(Ray Tracing)
如何提高判断光线和物体是否有交点的速度呢❓
# 统一空间划分(Uniform Spatial Partitions)「Grids」
所有的空间划分,都是建立在计算光照之前。
适用于场景内物体分布均匀的情况。
# 预处理(Preprocess)
- 构建物体的包围盒。
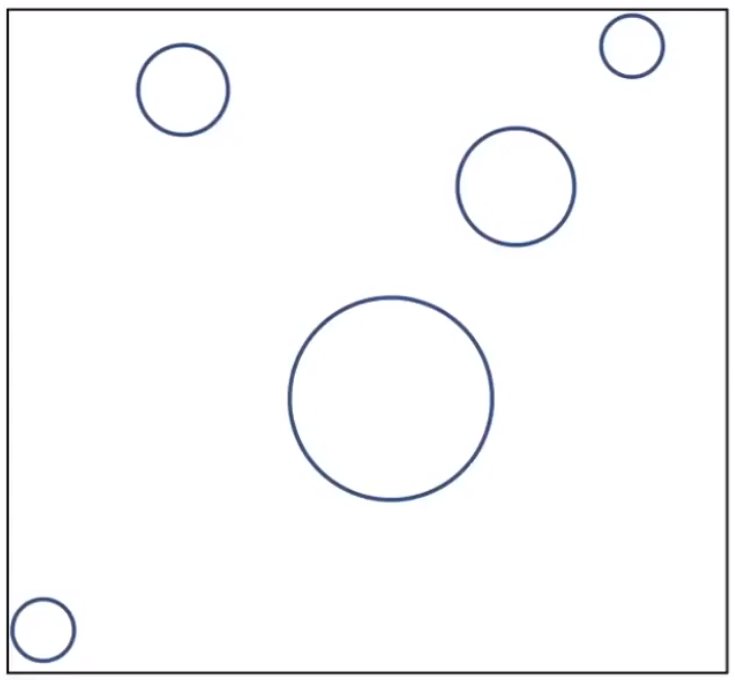
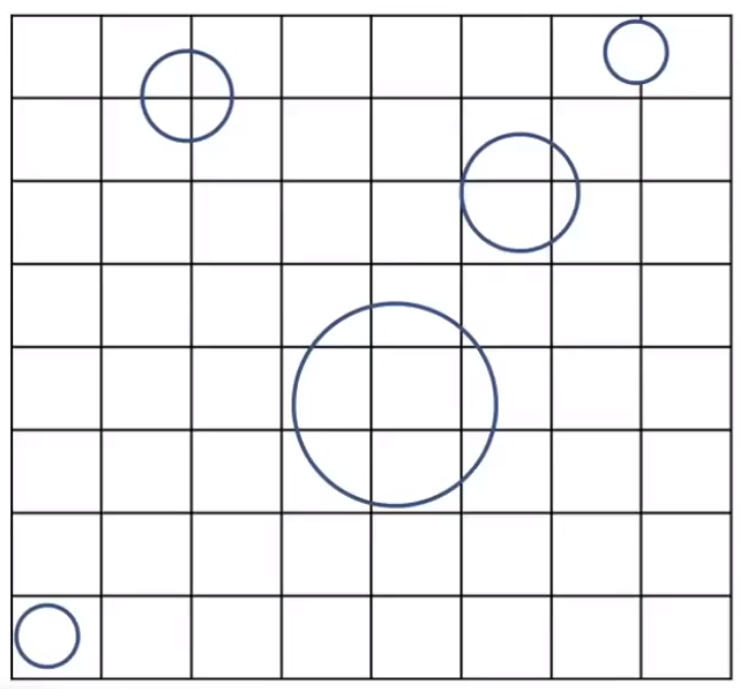
- 构建包围盒内的网格。
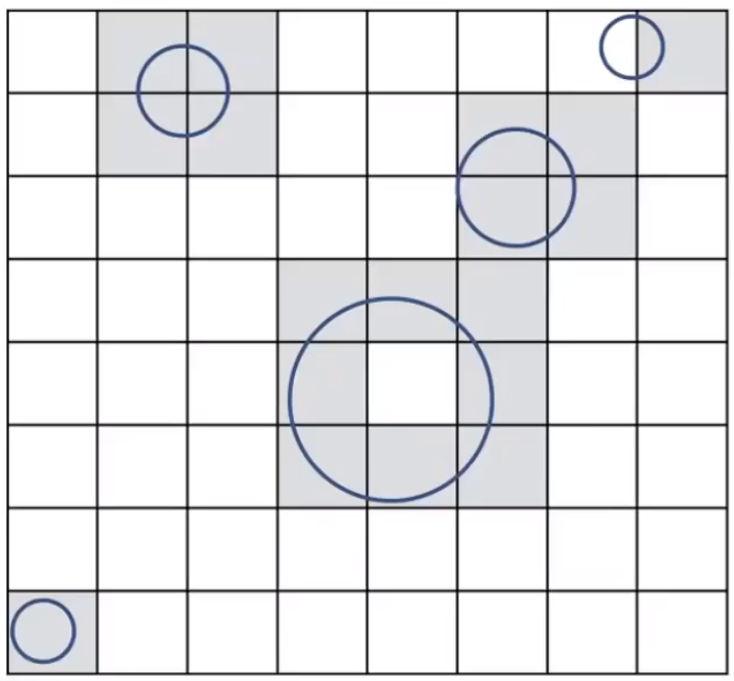
- 判断包围盒内是否有物体。
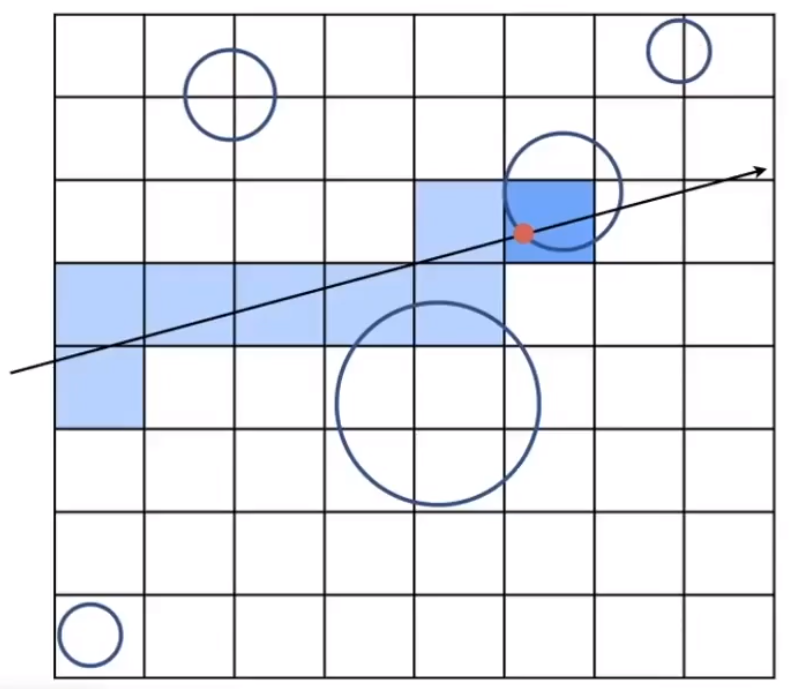
# Ray-Scene Intersection
假设:光线和实际物体求交的速度非常慢,但和网格求交非常快。
- 计算出和光线会发生相交的盒子。
- 判断盒子内是否存在物体。
- 存在的情况下,对光线和盒子内的物体求交点。
这里存在一个平衡,如果格子划分太大或者太小,都可能降低性能。
# 空间划分(Spatial Partitions)
相比于「Uniform Spatial Partitions」。「Spatial Partitions」针对不同大小的物体,会采用不同的划分方式,以减小计算消耗。
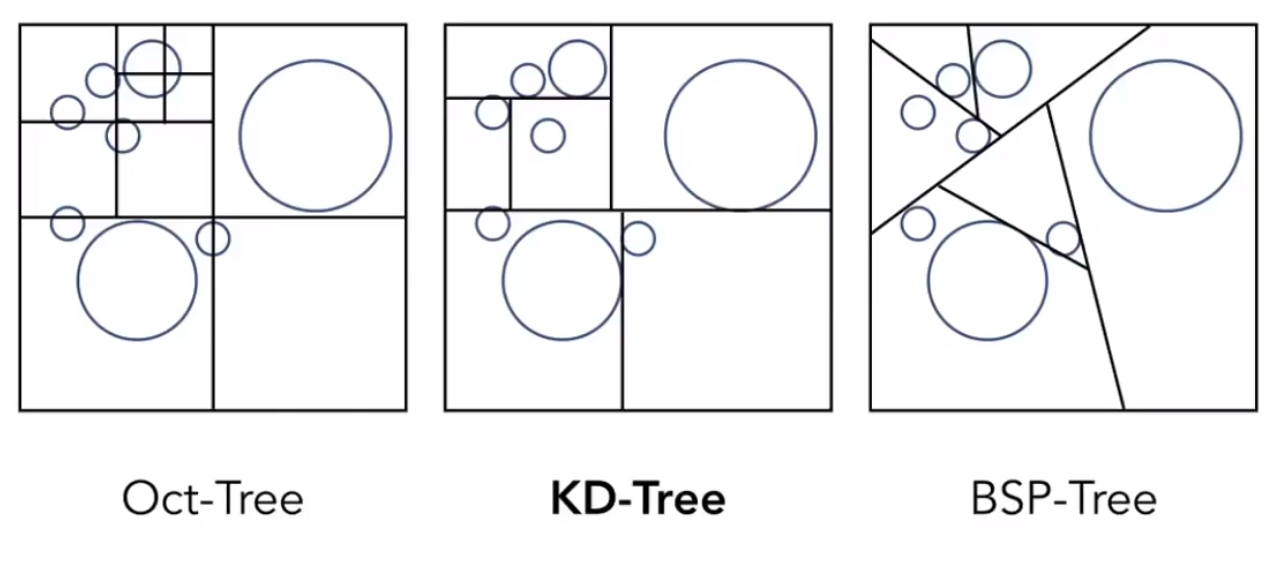
# 八叉树(Oct-Tree)
把空间的立方体切分为八块。再对新的八个方块进行类似操作,以此类推。二维空间内,就是四叉树。
# KD-Tree
相比于八叉树,直接对空间中的立方体砍三刀。「KD-Tree」每次只会沿着包围盒砍一刀(x 轴一下,y 轴一下,z 轴一下,保证空间均匀)。
这样整个结构就类似一个二叉树。
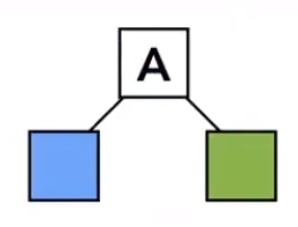
# KD-Tree Pre-Processing
先给空间竖的砍一刀。
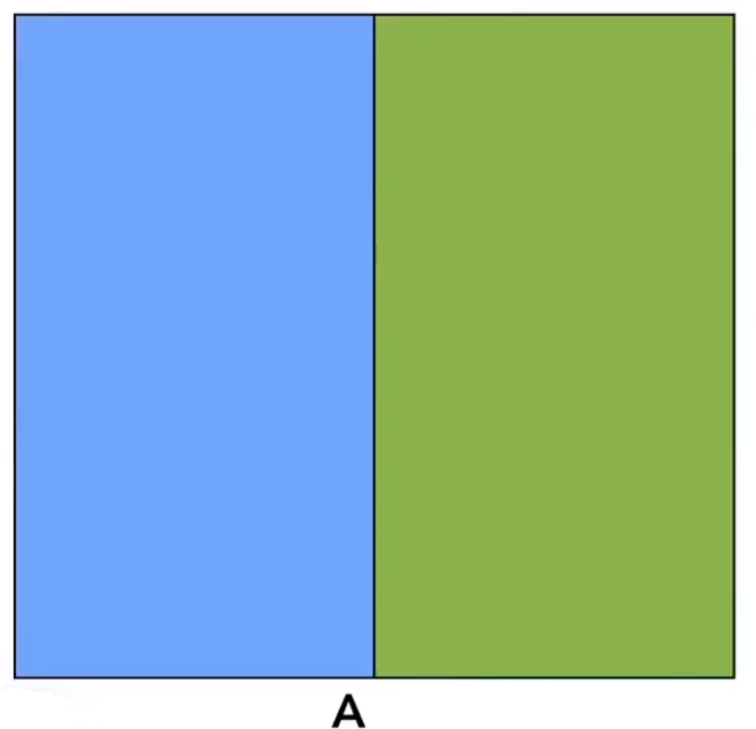
再对每个小空间,横的砍一刀(按理是需要继续划分的,这里只画一半)。
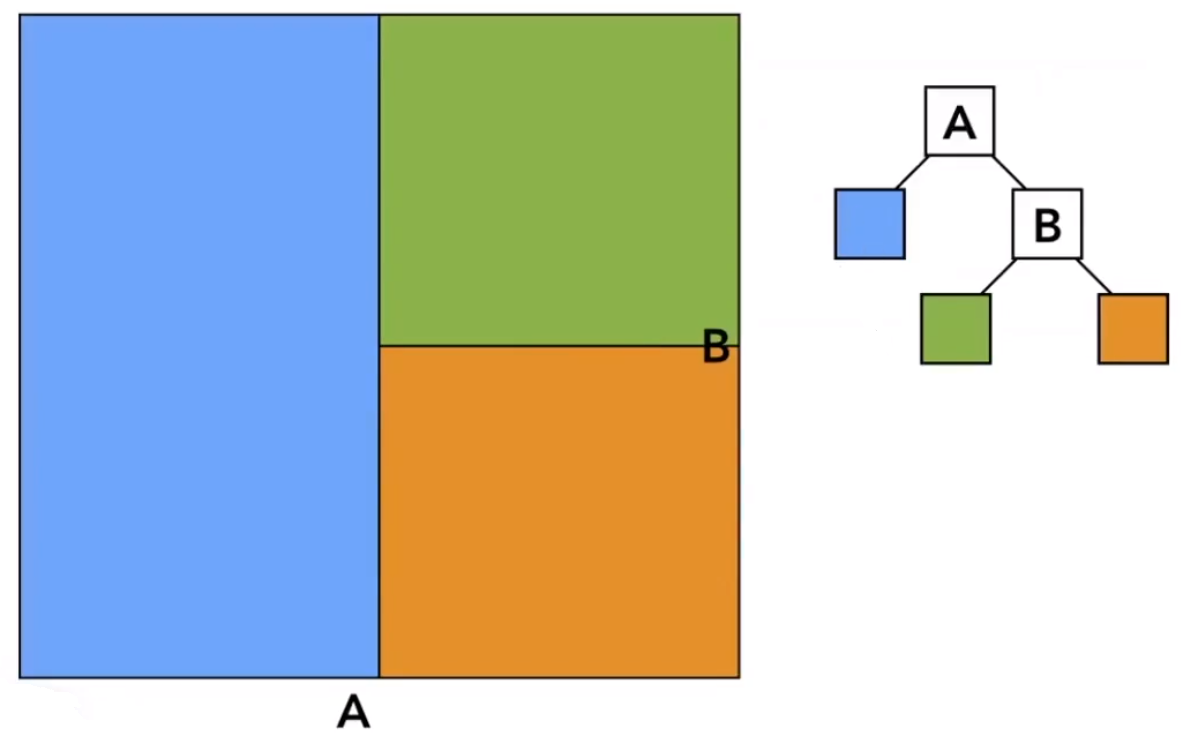
一直这样反复,最终可以得到一个二叉树结构,然后树的叶子节点就存储了该节点下的物体。
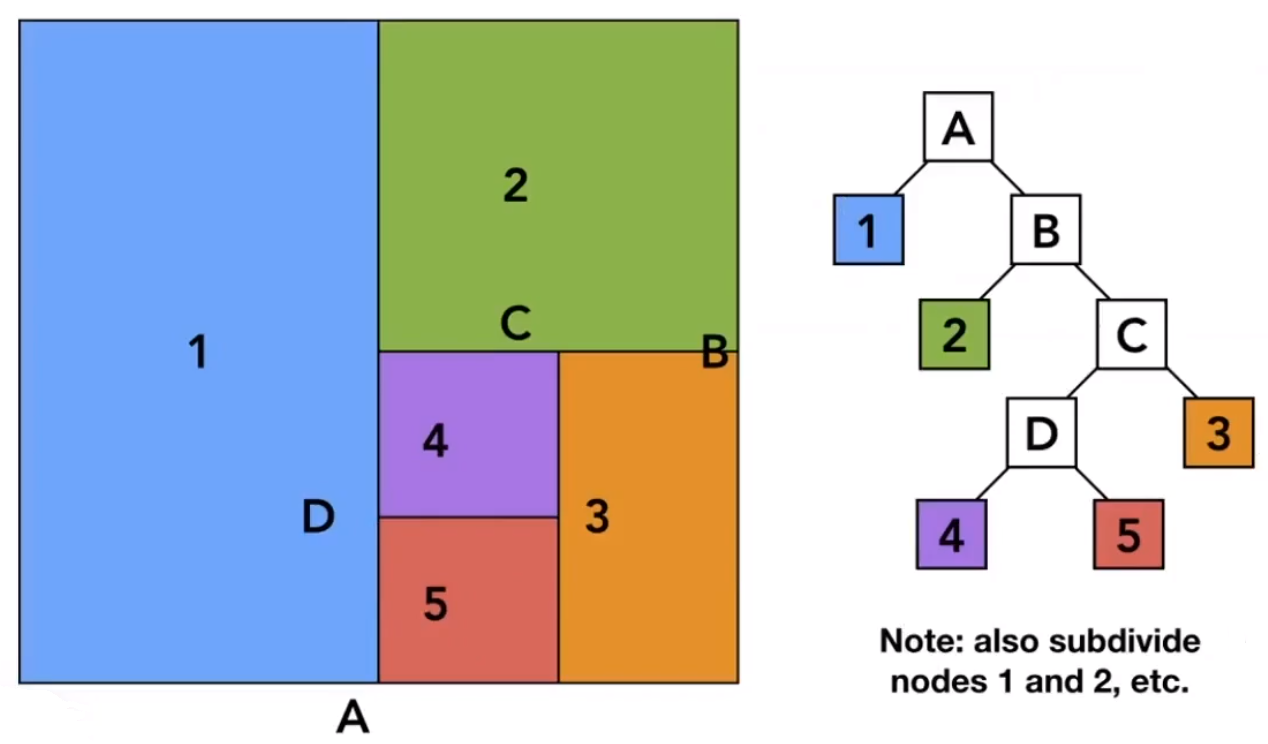
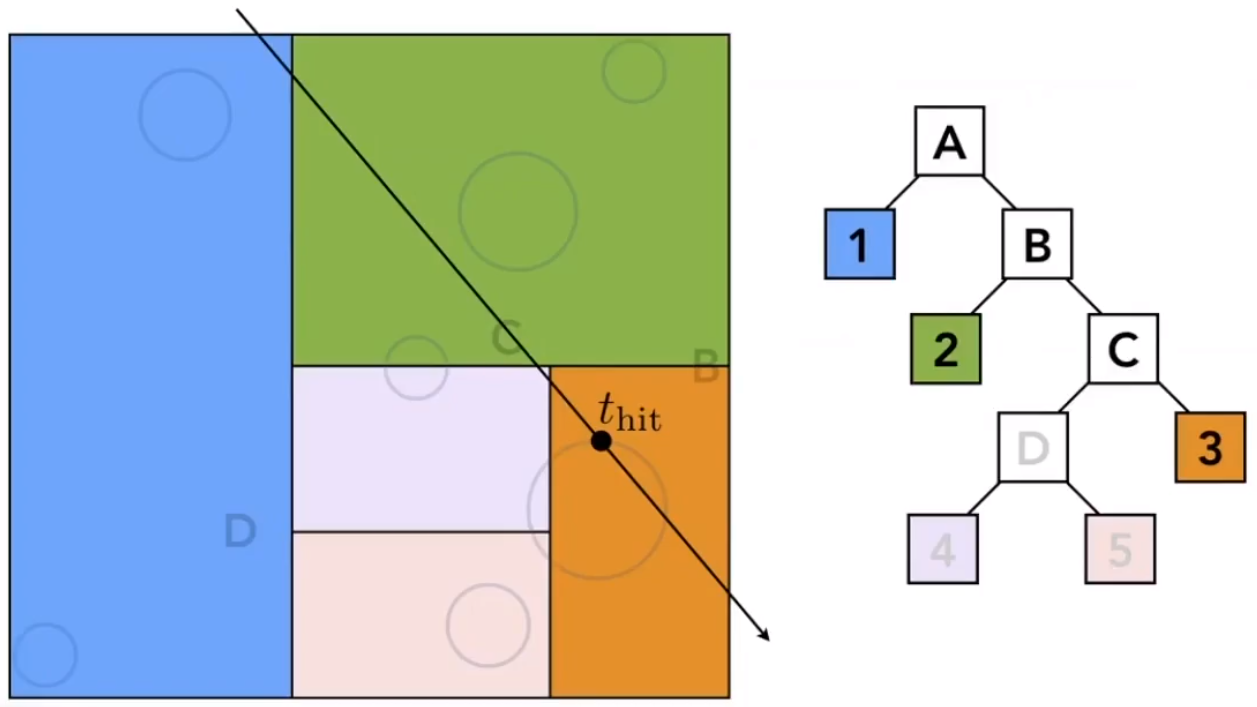
# Traversing a KD-Tree
依次从根节点开始,遍历格子是否和光线有交点。
如果有交点,切该节点非叶子节点,则分别求其子节点是否和光线有交点。
之后就可以求得光线和所有有交点的叶子节点。
再把在叶子节点的所有物体都和光线求交,就可以判断哪些物体和光线存在交点了。
# 「KD-Tree」的弊端
- 很难判断一个三角形和一个物体是否相交(三角形三条边和物体之间都没相交的情况 —— 包裹了物体)。
- 如果一个物体同时存在多个盒子里,就需要对物体进行多次相交计算。
# BSP-Tree
类似「KD-Tree」,只不过砍的时候,是斜着砍的。
# Object Partitions & Bounding Volume Hierarchy(BVH)
相比于上面的针对空间的划分,该划分方式则是以「物体」为单位的划分。
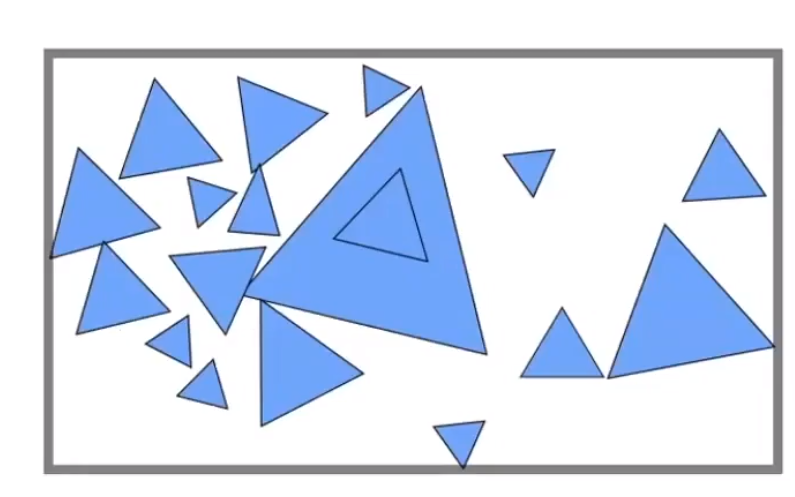
# Bounding Volume Hierarchy(BVH)
首先把所有物体归到一个包围盒内。
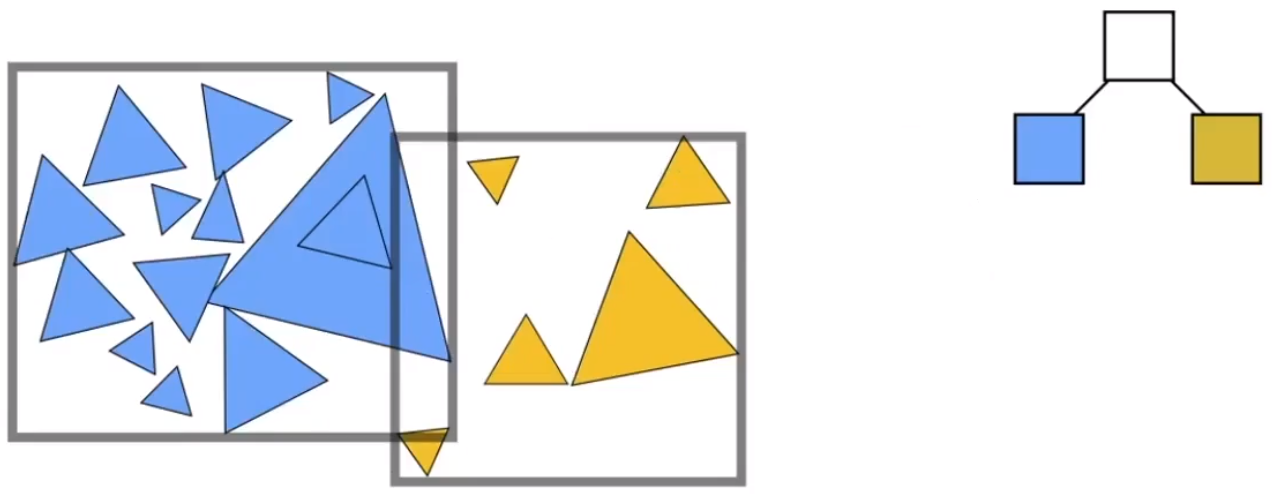
把当前的包围盒「试图」(暂不考虑怎么分)分为两部分。
以此类推,继续划分,知道满足某些规则后停止。例如:某个盒子内有 N 个三角形。
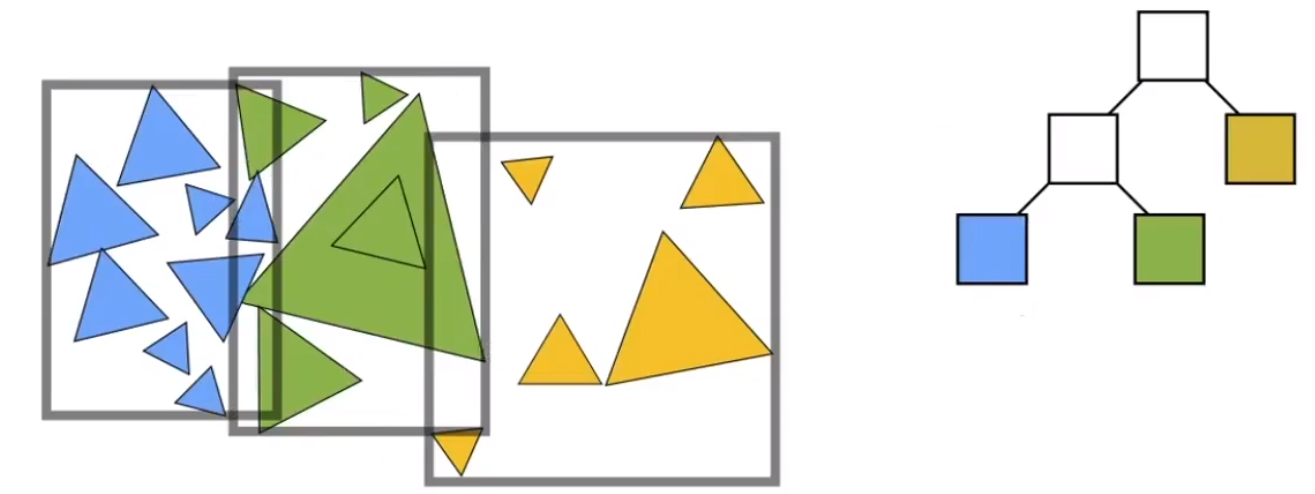
# BVH 的性质:
- 一个物体只能存在于一个盒子内。
- 不同的盒子之间会有交集。
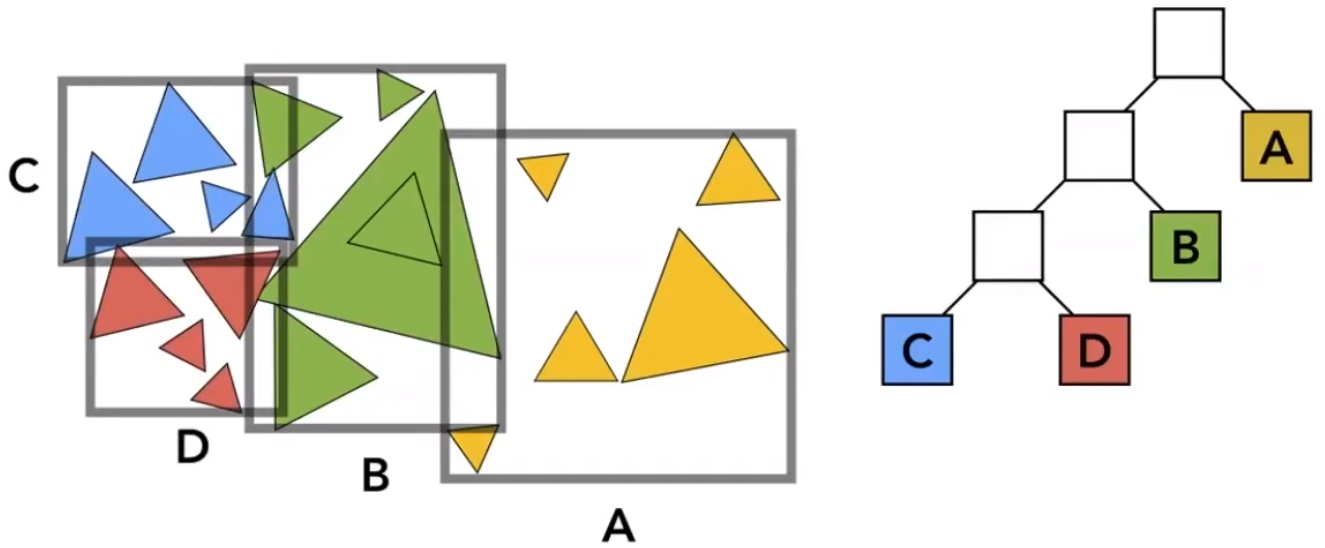
# Building BVHs
划分包围盒的策略很多,例如:
- 每次都按照最长的轴进行划分(保证包围盒划分均匀)。
- 从包围盒中间的物体进行划分(保证两颗树保持平衡)。
# 扩展阅读
GTC news:DLSS 2.0 传送门
GTC news:RTXGI 传送门
# 关键字
- 快速选择算法:求 n 个数内,第 i 大的数。时间复杂度 。本质上就是快排,每次的锚点就是第 k 大的数,然后根据锚点 k 和 i,判断是否继续进行快排和快排的集合。